
SubMerge is an initiative of the Dutch drinking water supply companies Vitens, Evides and Brabant Water. We are developing an autonomous in-pipe inspection robot.
Our robot creates radical change in water pipe network management. It can precisely determine the condition of drinking water pipes, using a camera, ultrasonic sensor, hydrophone and positioning algorithm. The robot is able to flexible crawl trough drinking water pipes. Following its navigation mission and operating under ground, the robot makes its own decisions and movements. The robots crawls from base station to base station. Reaching a base station, the robot gets recharged, exchanges its data and proceeds with a new mission.
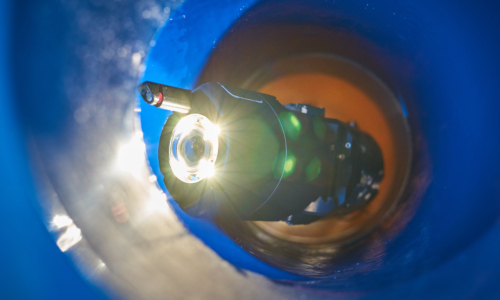
Robot
The autonomous inspection robot (AIR) crawls trough main drinking water pipes. Its measures the pipe conditions and location. The robot is equipped with a camera, hydrophone and ultrasound sensor. Operating 1 meter below surface level makes external communication impossible. Acquired knowledge is used by the robot to navigate and anticipate on unknown events. Reaching its charging point the robots recharges its batteries and exchanges its data.
Base station

The base stations make it possible to augment the reach of the robot. It has wireless recharging of the robot batteries and interacts with the robot by exchanging data. A base station can be clamped onto existing drinking water pipe. The base stations can be connected to the public power grid or can contain its own energy source. M2M protocols make it possible to communicate with the server network.
Network
SubMerge creates an in-pipe inspection network. Its consists if an inspection robot, an insertion point and several base stations. Our inspection robot operates autonomous by navigating from base station to base station. Each part of the network will be inspected at least twice a year. The robot is designed to inspect up to 66% of the main drinking water network. Each robot inspects its own island, covering for example a city area. Islands can be connected to each other.
Software
User software makes is possible to plan missions for the robot. Data from the robot can be collected and analysed. Photographs, ultrasound and hydrophone data can be processed to a 3D pipe model. The operator gets alarms wheninterruptions or leakages are localised. The software predicts the remaining lifetime and leakage risk of the pipes.